Co to jest i jak działa adaptacyjne zawieszenie
Zawartość
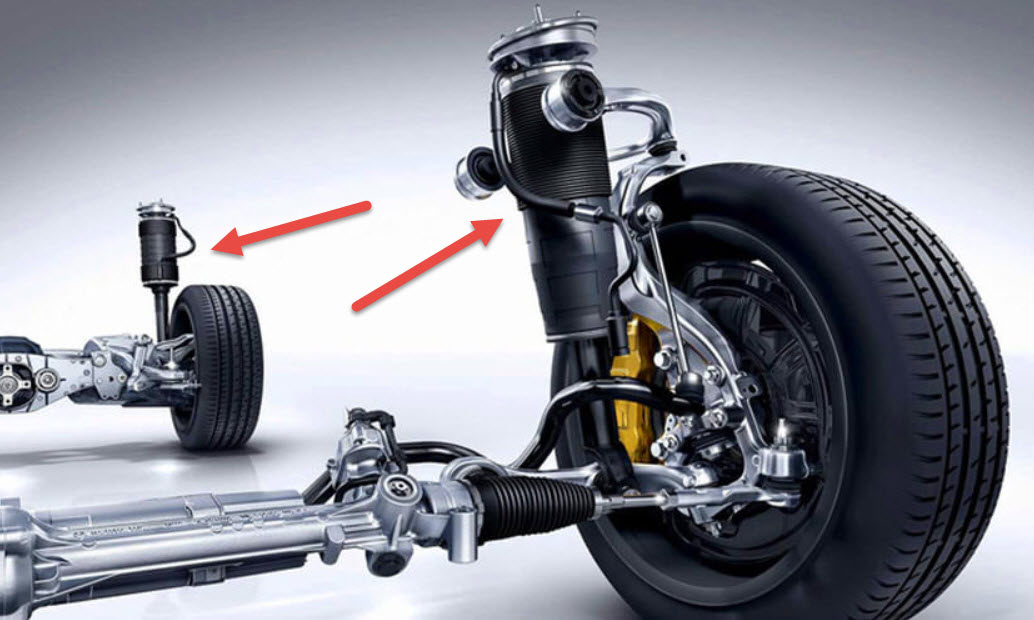
Jednym ze sposobów na ulepszenie zawieszenia samochodu jest dostosowanie go do charakteru drogi, prędkości lub stylu jazdy. Jest to możliwe do zrealizowania za pomocą sprzętu elektronicznego i szybkich siłowników elektromagnetycznych, pneumatycznych i hydraulicznych. Ten sam samochód, przy szybkiej zmianie charakterystyki zawieszenia, może nabyć indywidualne możliwości sportowego samochodu drogowego, SUV-a czy lekkiej ciężarówki. Lub po prostu znacznie poprawić komfort pasażerów.
Podstawy organizowania adaptacji
Aby uzyskać zdolność adaptacji do wpływów zewnętrznych lub poleceń kierowcy, zawieszenie musi nabrać aktywnego charakteru. Mechanizmy pasywne zawsze jednoznacznie reagują na określone wpływy. Aktywni potrafią zmieniać swoje cechy. W tym celu mają elektroniczną jednostkę sterującą, którą jest komputer, który zbiera informacje z czujników i innych systemów pojazdu, odbiera instrukcje od kierowcy i po przetworzeniu ustawia tryb na siłowniki.

Jak wiadomo zawieszenie składa się z elementów sprężystych, urządzeń tłumiących i łopatki kierującej. Teoretycznie można sterować wszystkimi tymi elementami, ale w praktyce wystarczy zmienić właściwości amortyzatorów (amortyzatorów). Jest to stosunkowo łatwe przy akceptowalnej wydajności. Chociaż jeśli prędkość reakcji nie jest wymagana, na przykład tryb parkowania, zmiana luzu lub sztywność statyczna podlega korektom, to całkiem możliwe jest dostosowanie konfiguracji zawieszenia dla wszystkich jego elementów.
W celu dostosowania operacyjnego konieczne będzie uwzględnienie wielu parametrów wejściowych:
- dane o nierównościach nawierzchni drogowych, zarówno obecnych, jak i przyszłych;
- prędkość ruchu;
- kierunek, czyli kąt obrotu kół kierowanych i przyspieszenie kątowe samochodu jako całości;
- pozycja i prędkość obrotu kierownicy;
- wymagania kierowcy na podstawie analizy jego stylu jazdy, a także wprowadzone w trybie ręcznym;
- położenie ciała względem drogi, parametry jego zmiany w czasie;
- sygnały z czujników radarowych, które analizują stan zasięgu przed samochodem;
- przyspieszenia wzdłużne i poprzeczne trybu pracy samochodu, silnika i układu hamulcowego.
Program bloku sterującego zawiera algorytmy reagowania na wszystkie przychodzące sygnały i gromadzenia informacji. Polecenia są zazwyczaj wysyłane do elektrycznie sterowanych amortyzatorów wszystkich kół, osobno dla każdego, a także do aktywnych sprzęgieł stabilizatorów. Lub do urządzeń, które je zastępują podczas pracy w ramach w pełni sterowanych hydraulicznie zawieszeń, a także do najbardziej zaawansowanych technologicznie produktów, które działają wyłącznie na interakcję elektromagnetyczną. W tym drugim przypadku szybkość reakcji jest tak duża, że z działania zawieszenia można uzyskać prawie idealne zachowanie.
Skład systemu
W skład kompleksu wchodzą urządzenia zapewniające regulację właściwości tłumiących i sztywności dynamicznej, a także minimalizujące przechyły nadwozia:
- kontroler zawieszenia z mikroprocesorem, pamięcią i obwodami I/O;
- aktywne mechanizmy parowania rolki (sterowane stabilizatory);
- kompleks czujników;
- amortyzatory umożliwiające elektroniczną kontrolę sztywności.
Steruje deska rozdzielcza, najczęściej jest to interaktywny wyświetlacz pokładowy, kierowca może ustawić jeden z trybów pracy według swoich preferencji. Dozwolona jest przewaga komfortu, sportowego charakteru lub zdolności terenowych, a także bardziej zaawansowanej personalizacji funkcji z pamięcią trybów. Skumulowaną adaptację można szybko przywrócić do pierwotnych ustawień.

Wymagania dotyczące stabilizatorów poprzecznych są zawsze kontrowersyjne. Z jednej strony ich celem jest zapewnienie minimalnego przechyłu ciała. Ale w ten sposób zawieszenie nabiera charakteru uzależnienia, co oznacza zmniejszenie komfortu. Podczas jazdy po złych drogach cenniejszą cechą będzie jeszcze większa swoboda poszczególnych kół w celu uzyskania maksymalnego przegubu osi. Tylko w ten sposób wszystkie rezerwy skoku zawieszenia zostaną w pełni wykorzystane, aby zapewnić stały kontakt opon z powłoką. Stabilizator o stałej sztywności, jakim jest zwykle zwykły pręt ze stali sprężynowej, pracujący na zasadzie skrętu, nie będzie w stanie równie dobrze służyć w każdych warunkach.
W aktywnych zawieszeniach stabilizator jest dzielony, z możliwością elektronicznej regulacji. Do kontrolowania zmniejszonej sztywności można zastosować różne zasady. Niektórzy producenci stosują napięcie wstępne do skręcania przez silnik elektryczny ze skrzynią biegów, inni stosują metodę hydrauliczną, instalując siłowniki hydrauliczne na stabilizatorze lub jego mocowaniu do nadwozia. Możliwe jest również całkowite imitowanie stabilizatora za pomocą pojedynczych siłowników hydraulicznych pracujących równolegle z elementami elastycznymi.
Regulowane amortyzatory
Konwencjonalny amortyzator ma właściwość zmiany sztywności dynamicznej w zależności od prędkości i przyspieszenia ruchu pręta. Osiąga się to dzięki systemowi zaworów dławiących, przez które przepływa płyn tłumiący.
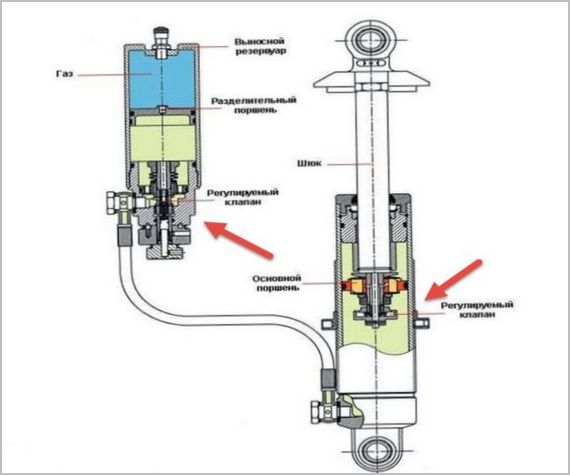
W celu operacyjnego sterowania przepustnicami obejściowymi możliwe są dwa sposoby - zainstalowanie zaworów elektromagnetycznych typu suwakowego lub zmiana właściwości cieczy w polu magnetycznym. Producenci stosują obie metody, drugą rzadziej, ponieważ będzie wymagał specjalnego płynu, który zmienia lepkość w polu magnetycznym.
Główne różnice operacyjne zawieszeń adaptacyjnych
Aktywne zawieszenia z właściwością adaptacji zapewniają możliwość programowego sterowania właściwościami konsumenckimi samochodu na dowolnej drodze:
- ciało zawsze utrzymuje daną pozycję względem drogi, od której odchylenia są określane jedynie przez prędkość układu adaptacyjnego;
- koła mają maksymalny możliwy do uzyskania stały kontakt z powłoką;
- poziom przyspieszenia w kabinie z wybojów jest znacznie niższy niż przy tradycyjnym zawieszeniu, co zwiększa komfort podróży;
- samochód jest lepiej kontrolowany i stabilniejszy przy dużych prędkościach;
- najbardziej zaawansowane systemy mogą przewidywać nierówności, skanując drogę przed kołami i regulując amortyzatory z wyprzedzeniem.
Wadą, podobnie jak w przypadku wszystkich złożonych systemów, jest jedna - duża złożoność i związane z nią wskaźniki niezawodności i kosztów. Dlatego adaptacyjne zawieszenia są stosowane w segmencie premium lub jako wyposażenie opcjonalne.
Algorytmy pracy i zestaw urządzeń są coraz bardziej złożone i udoskonalane. Głównym celem prac rozwojowych w dziedzinie aktywnych zawieszeń adaptacyjnych jest osiągnięcie maksymalnej reszty karoserii, niezależnie od tego, co dzieje się z kołami i związanymi z nimi masami nieresorowanymi. W takim przypadku wszystkie cztery koła muszą stale utrzymywać kontakt z drogą, utrzymując samochód na danej trajektorii.